A group of University of Arizona researchers have received funding from NASA to research potential space mining methods using robots. The team, led by the College of Engineering, is working on creating a system of robots that would be able to mine the moon’s existing resources in order to build infrastructure on the moon, rather than transporting vast amounts of materials from Earth to the lunar surface.
Mining on the lunar surface would be very different from mining on Earth. While blasting and drilling are used to break rocks on this planet, requiring ideal gravity and ample energy for such tasks, this would not be ideal on the moon. That is why researchers are working on developing chemical processes for breaking down rocks.
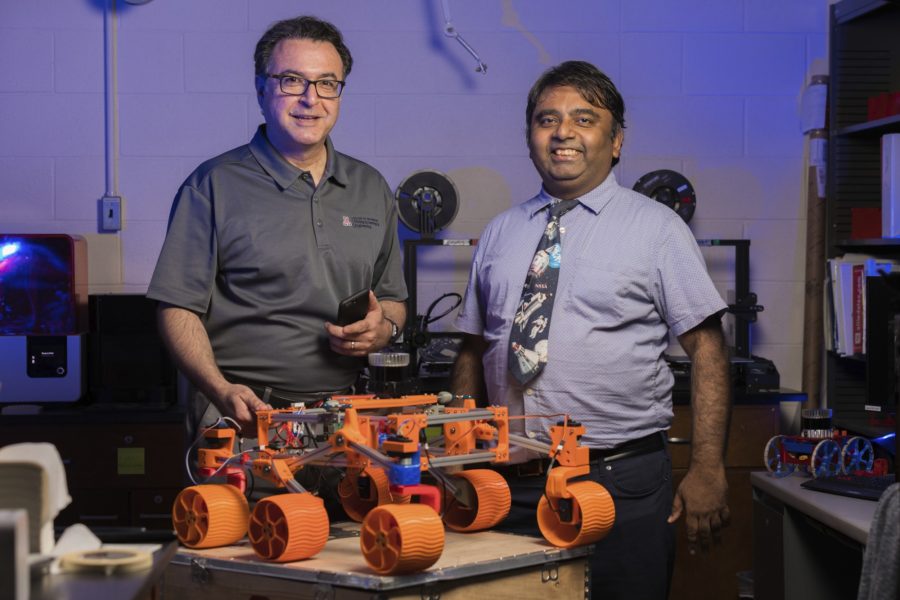
“I am using a coupled mechanical-electrochemical process to improve rock breakage by as much as a factor of five depending on the rock type. This process makes the rock weaker locally than it normally does which in turn allows us to break it or drill through it faster,” said Moe Momayez, associate professor and interim head of the UA’s Department of Mining and Geological Engineering.
Researchers are working on using Human and Explainable Autonomous Robotic Systems, a “neuromorphic learning architecture technique” to train swarms of robots. Using this, robots can perform numerous complicated tasks.
“We are looking forward to robots to do excavation, site preparation, preliminary construction and maintenance. We can provide a 3D blueprint and the robots learn to best achieve the 3D blueprint,” said Jekan Thanga, an associate professor of aerospace and mechanical engineering doing research on lunar robotic mining solutions.
“The controllers learn to solve task without human supervision. They can teach themselves and be creative, learn advanced concepts from scratch,” Thanga said.
It is intended that these robots would be completely autonomous and would not need to receive instructions from an earthbound team.
Follow the Daily Wildcat on Twitter